
TC1250 | TwinCAT 3 PLC/NC PTP 10

TC1250 | TwinCAT 3 PLC/NC PTP 10

Erweiterung der TwinCAT 3 PLC TC1200 um die Möglichkeit, Punkt-zu-Punkt-Bewegungen in Software zu realisieren (TwinCAT 3 NC PTP 10). Die Achsen werden durch Achsobjekte repräsentiert und stellen ein zyklisches Interface für z. B. die SPS zur Verfügung. Dieses Achsobjekt wird dann zu einer entsprechenden physikalischen Achse verknüpft. Verschiedenste Achstypen mit verschiedensten Feldbusschnittstellen können so abstrakt mit den Achsobjekten, die immer ein gleiches Interface und eine identische Konfigurationsoberfläche anbieten, verbunden werden. Die Regelung der Achsen kann in verschiedenen Konstellationen (Positions- oder Geschwindigkeits- oder Drehmomentschnittstelle) konfiguriert werden. Die Konfiguration der Achsen erfolgt im TwinCAT 3 Engineering.
Eigenschaften
- bis zu 10 Achsen, auf max. 255 Achsen ausbaubar
- unterstützt elektrische und hydraulische Servoantriebe, Frequenzumrichterantriebe, Schrittmotorantriebe, Gleichstromantriebe, geschaltete Antriebe (Eil-/Schleichachsen), Simulationsachsen, Encoderachsen
- unterstützt verschiedenste Feldbusschnittstellen wie EtherCAT (CoE, SoE)
- Standardachsfunktionen wie Start/Stopp/Reset/Referenzieren, Geschwindigkeits-Override, Master-/Slavekopplungen, Elektronisches Getriebe, Online-Distanzkompensation
- Programmierung erfolgt über PLCopen-konforme IEC 61131-3-Funktionsbausteine
- komfortable Achsen-Inbetriebnahmemöglichkeiten
- Online-Monitor aller Achszustandsvariablen wie Ist-/Sollwerte, Freigaben, Regelungswerte
- Online-Achstuning
- Konfiguration aller Achsparameter wie Messsystem, Driveparameter und Lageregler
- konfigurierbare Reglerstrukturen P-Regler, PID-Regler, PID mit Geschwindigkeitsvorsteuerung, PID mit Geschwindigkeits- und Beschleunigungsvorsteuerung
- Online-Master/Slave- sowie Slave/Master-Umwandlung
- Fliegende Säge
- Kurvenscheiben (Unterstützung durch TwinCAT 3 CAM Design Editor [optional])
- flexible Umsetzung kundenspezifischer Bewegungsprofile mit externer Sollwertvorgabe aus der PLC
- Multi-Master-Kopplung
- SPS-Bibliothek OMAC PackML
Produktstatus:
Serienlieferung
Produktinformationen
| Technische Daten | TC1250 |
|---|---|
| Beinhaltet | TC1200, TF5000 |
| Betriebssystem | Windows 7, Windows 10, Windows CE, TwinCAT/BSD |
| CPU-Architektur | x86, x64, ARM |
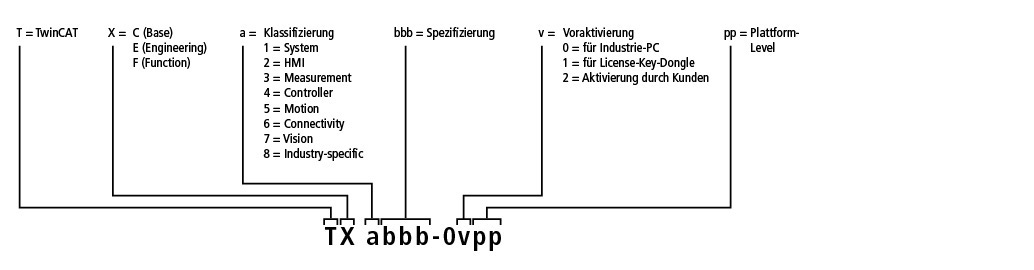
| Bestellangaben | |
|---|---|
| TC1250-0v30 | TwinCAT 3 PLC/NC PTP 10 axes, Plattform-Level 30 (Economy Plus) |
| TC1250-0v40 | TwinCAT 3 PLC/NC PTP 10 axes, Plattform-Level 40 (Performance) |
| TC1250-0v50 | TwinCAT 3 PLC/NC PTP 10 axes, Plattform-Level 50 (Performance Plus) |
| TC1250-0v60 | TwinCAT 3 PLC/NC PTP 10 axes, Plattform-Level 60 (Mid Performance) |
| TC1250-0v70 | TwinCAT 3 PLC/NC PTP 10 axes, Plattform-Level 70 (High Performance) |
| TC1250-0v80 | TwinCAT 3 PLC/NC PTP 10 axes, Plattform-Level 80 (Very High Performance) |
| TC1250-0v81 | TwinCAT 3 PLC/NC PTP 10 axes, Plattform-Level 81 (Very High Performance) |
| TC1250-0v82 | TwinCAT 3 PLC/NC PTP 10 axes, Plattform-Level 82 (Very High Performance) |
| TC1250-0v83 | TwinCAT 3 PLC/NC PTP 10 axes, Plattform-Level 83 (Very High Performance) |
| TC1250-0v84 | TwinCAT 3 PLC/NC PTP 10 axes, Plattform-Level 84 (Very High Performance) |
| TC1250-0v90 | TwinCAT 3 PLC/NC PTP 10 axes, Plattform-Level 90 (Other) |
| TC1250-0v91 | TwinCAT 3 PLC/NC PTP 10 axes, Plattform-Level 91 (Other 5…8 Cores) |
| TC1250-0v92 | TwinCAT 3 PLC/NC PTP 10 axes, Plattform-Level 92 (Other 9…16 Cores) |
| TC1250-0v93 | TwinCAT 3 PLC/NC PTP 10 axes, Plattform-Level 93 (Other 17…32 Cores) |
| TC1250-0v94 | TwinCAT 3 PLC/NC PTP 10 axes, Plattform-Level 94 (Other 33…64 Cores) |
Für Plattform-Level 90-94 empfehlen wir den Einsatz eines TwinCAT-3-Lizenzdongles.
Inhalte werden geladen ...
Inhalte werden geladen ...
Inhalte werden geladen ...
Inhalte werden geladen ...
© Beckhoff Automation 2024 - Nutzungsbedingungen